Для преобразования какой энергии предназначены асинхронные двигатели?
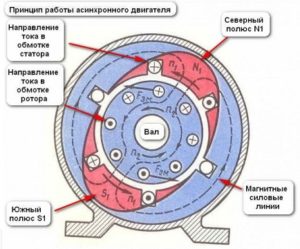
Асинхронный двигатель принцип работы
Среди разнообразия выпускаемых на сегодняшний день типов электрических моторов большое распространение получили асинхронные двигатели. Их мощность и эффективность обеспечивает использование в деревообрабатывающей и металлообрабатывающей промышленности, в насосных агрегатах, на фабриках, в станках и ручном электрическом инструменте.
Асинхронный двигатель: что это
Асинхронный двигатель – это асинхронная электрическая машина, применяемая для преобразования электрической энергии в механическую. Асинхронный дословно означает неодновременный – здесь имеется в виду, что у асинхронного двигателя магнитное поле всегда имеет большую частоту вращения, чем ротор, который словно пытается его догнать. Работают эти машины от сетей с переменным током.
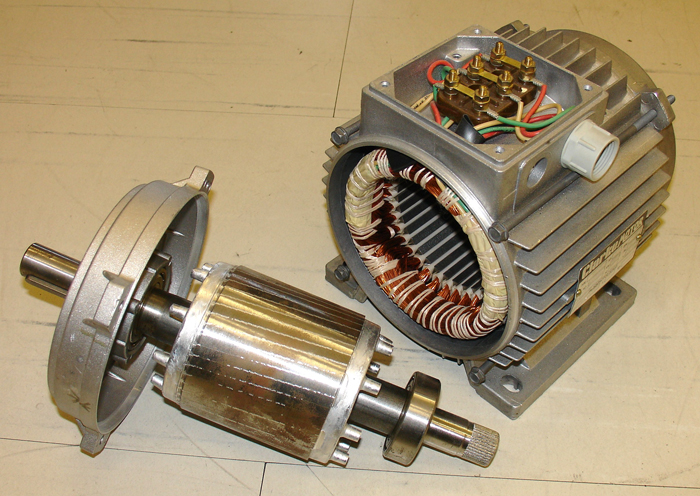
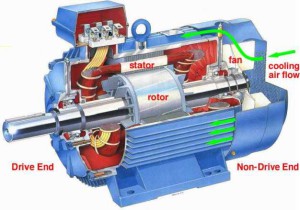
Любой асинхронный двигатель состоит из двух ключевых составляющих: ротора и статора. Эти части не контактируют между собой и отделены друг от друга воздушным зазором, в котором формируется подвижное магнитное поле.
Статор асинхронной машины состоит из следующих частей:
- Корпус. Служит для скрепления всех деталей мотора. Для двигателей небольшого размера, как правило, используют цельные литые корпусы из чугуна, стальных и алюминиевых сплавов.
- Сердечник или магнитопроводник. Собирается из пластин, для изготовления которых применяют специальную электрическую сталь. Запрессовывается в корпус и улучшает магнитно-индукционные качества машины. Каждая пластина сердечника покрывается особым лаком, позволяющим уменьшить потери при возникновении вихревых токов. В некоторых случаях устройство асинхронного двигателя предусматривает установку корпуса-сердечника, совмещающего в себе обе функции.
- Обмотки. Устанавливаются в пазы сердечника. Представляет собой три катушки из меднопроволочных секций, расположенные под углом в 120˚ относительно друг друга. Называется первичной, потому что подключается к сети напрямую.
Конструкция ротора состоит из основного блока с вентиляционной крыльчаткой, опирающегося на подшипники. Связь ротора с приводимым в движение механизмом обеспечивается с помощью прямого подключения, редукторов или других способов передачи механической энергии. В асинхронных двигателях используются два вида роторов:
- Массивный ротор – единая схема из прочного ферромагнитного соединения. Внутри неё индуцируются токи, и она же выполняет в конструкции роль магнитопровода.
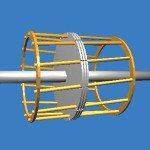
- Короткозамкнутый ротор (изобретён великим русским инженером Михаилом Осиповичем Доливо-Добровольским, как и весь трёхфазный ток) – система соединенных с помощью колец проводников, похожая по внешнему виду на беличье колесо. Внутри него индуцируются токи, чье электромагнитное поле вступает во взаимодействие с магнитным полем статора, в результате чего ротор приводится в движение.
Рекомендуем посмотреть это видео. Оно хоть и старое, но интересное и познавательное. Позволит закрыть непонятные моменты.
Трехфазный асинхронный двигатель. Принцип работы
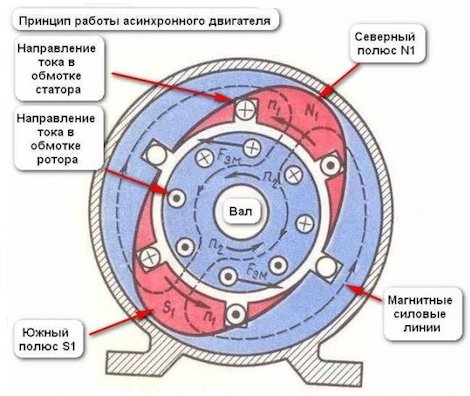
Принцип действия асинхронного двигателя заключается во взаимном расположении обмоток и трехфазном напряжении, что приводит к возникновению вращающегося магнитного поля, которое и выступает движущей силой.
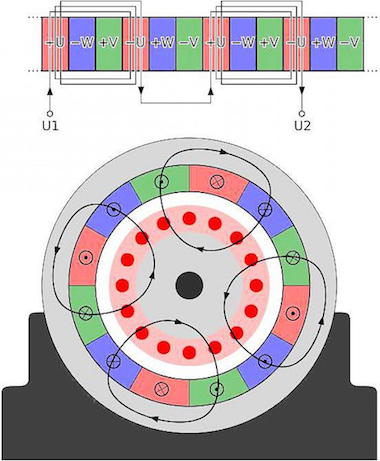
Подробнее говоря, при подаче питания на первичную обмотку, на фазах образуются три магнитных потока, изменяющихся в зависимости от частоты входного напряжения. Они смещены между собой не только в пространстве, но и во времени, благодаря чему и появляется вращающийся магнитный поток.
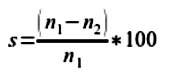
Во время вращения результирующий поток создает ЭДС в роторных проводниках. По причине того, что обмотка ротора представляет собой замкнутую цепь, в ней создается ток, создающий пусковой момент в направлении вращения магнитного поля статора. Это приводит к вращению ротора после превышения пусковым моментом его тормозного момента. Наблюдаемое в этот момент явление называется скольжением — величиной, показывающей в виде процентов соотношение частоты вращения магнитного поля к частоте вращения ротора. 
(n1 – частота магнитного поля статора; n2 – частота вращения ротора)
Скольжение является очень важным параметром. На старте его величина всегда равна 1 и, естественно, становится меньше по мере увеличения разности между n1 и n2, что сопровождается также уменьшением электродвижущей силы и вращающего момента. Во время работы на холостом ходу скольжение минимально и растет по мере увеличения статического момента. Достигнув критического скольжения (обозначается как sкр), может спровоцировать опрокидывание двигателя. После уравновешивания тормозного и электромагнитного момента изменения величин прекращаются.
Таким образом, принцип действия асинхронного двигателя основывается на взаимодействии магнитного поля ротора, находящегося во вращении, и токов, наведенных в роторе этим же полем. При этом обязательным условием возникновения вращающего момента является разница частот вращения полей.
Однофазный асинхронный двигатель
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Двухфазный асинхронный двигатель
Создать вращающееся магнитное поле можно и при использовании двухфазных обмоток. Для обеспечения работоспособности схемы фазы обмоток необходимо расположить с 90˚ смещением друг от друга. При их питании токами, которые смещены по фазе на 90˚, возникает вращающееся магнитное поле, как и в трехфазной машине.
Асинхронный двухфазный электродвигатель приводится в движение за счет токов, образуемых при взаимодействии результирующего поля с роторными стержнями. Он ускоряется до того момента, пока не будет достигнута предельная скорость его вращения. Для питания такого двигателя от электросети однофазного тока необходимо создать сдвиг по фазе на одной из обмоток. Для этого применяются конденсаторы необходимой ёмкости.
На сегодняшний день все большее применение находят двухфазные асинхронных двигатели с полым алюминиевым ротором. Вращение ему придают вихревые токи, образованные внутри цилиндра, при взаимодействии с вращающимся магнитным полем.
Инерционный момент ротора наделяет двигатель хорошими характеристиками для использования в некоторых специализированных отраслях, как, например, системы, регулирующие работу мостовых и компенсационных схем. Одна из обмоток в них подключается к питающей сети через конденсатор, а через вторую проходит управляющее напряжение.
Схемы подключения
Для того чтобы подключить трехфазный асинхронный двигатель используют несколько различных схем, но чаще всего применяются «треугольник» и «звезда».
Треугольник
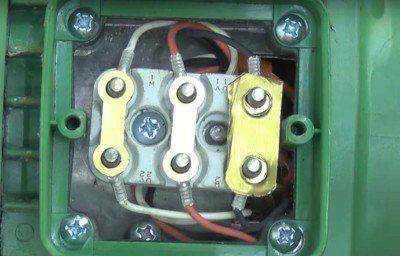
Преимущество данной схемы заключается в том, что при подключении согласно ей трехфазный двигатель может развивать наибольшую номинальную мощность. Для этого обмотки соединяются по принципу конец-начало, что на схематичном изображении похоже на треугольник, однако в виде треугольника понять что к чему, не всегда удобно. По этому предлагаем для анализа схему снизу, а затем фотографию уже в сборе (еще ниже).
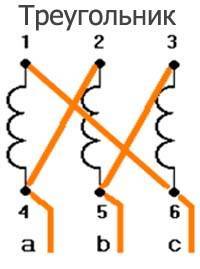
В трехфазных электрических сетях величина линейного напряжения между выводами обмоток составляет 380 В. При этом нет необходимости создания рабочего нуля. Важно отметить, что в такой схеме может возникнуть большой пусковой ток, значительно перегружающий проводку.
Звезда
Этот способ подключения является наиболее используемым в сетях с трехфазным током 380 В. Название схемы связано с тем, что концы обмоток соединяются в одной точке, словно звездные лучи. Начала обмоток подключаются посредством аппаратуры коммутации к фазным проводникам. В такой конструкции линейной напряжение между начал составляет 380 В, а между местом соединения и подключения проводника – 200 В. Ниже представлена схема, а еще ниже уже фотография в собранном виде.
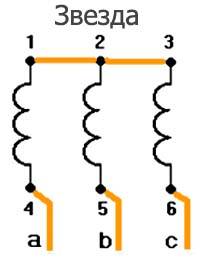
Трехфазный двигатель для 380 В сетей, подключенный таким образом, не способен развить максимальную силу из-за того, что напряжение на каждой обмотке составляет 220 В. В свою очередь, такая схема предотвращает возникновение перегрузок по току, чем обеспечивается плавный пуск.
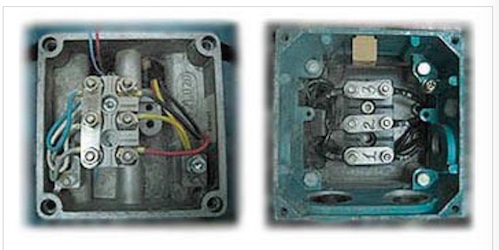
Возможность подключения двигателя тем или иным способом, как правило, указывается на его табличке. Значок Y означает «звезду», а ∆ — «треугольник». Определить схему на уже подключенной машине можно по виду обмоток – одна двойная перемычка между ними говорит, что использована «звезда» (первое фото снизу), а если между клеммами обмоток видно три перемычки – «треугольник» (первое фото сверху).

В случае, когда необходимо запустить трехфазный асинхронный электродвигатель в обратном направлении вращения, следует поменять два питающих провода от трехфазного источника местами.
Функциональные и эксплуатационные особенности
Характерные преимущества асинхронных двигателей:
- В их конструкции нет коллекторных групп, которые увеличивают износ других видов двигателей за счет дополнительного трения.
- Питание асинхронных электрических машин не требует использования преобразователей и может осуществляться промышленной трехфазной сети.
- Из-за меньшего количества деталей и конструктивных элементов они относительно легко обслуживаются и имеют большой срок службы.
Среди недостатков можно отметить:
- Сфера применения асинхронных двигателей несколько ограничена из-за малого пускового момента.
- Высокая реактивная мощность, которую они потребляют во время работы, не оказывает влияние на механическую мощность.
- Большие пусковые токи, потребляемые на пуске этих двигателей, могут превышать допустимые значения некоторых систем.
Как производятся расчеты
Для того чтобы вычислить частоту вращения двигателя следует воспользоваться определенной нам ранее формулой скольжения:
И выразить из нее скорость вращения ротора:
В качестве примера возьмем двигатель модели АИР71А4У2 мощностью в 550 Вт с 4 парами полюсов и частотой вращения ротора 1360 об/мин.
При питании от сети с частотой 50 Гц статор будет вращаться со скоростью:
Таким образом, величина скольжения электродвигателя составляет:
И, наконец, прекрасное, хотя и устаревшее, видео рекомендуемое всем для одноразового просмотра.
Преобразование энергии в асинхронном двигателе
При работе асинхронного двигателя происходит процесс преобразования электрической энергии в механическую энергию вращательного движения. Этот процесс сопровождается бесполезным расходом части энергии источника питания на нагрев машины, который характеризуют мощностями электрических, магнитных и механических потерь.
Мощностью электрических потерь характеризуют нагрев обмоток статора и ротора, обладающих активными сопротивлениями R< и /?2. По закону Джоуля — Ленца, она, как известно, пропорциональна квадрату тока в обмотке.
Мощностью магнитных потерь характеризуют нагрев стальных пакетов магнитопровода, вызванный явлениями перемагничивания (гистерезисом) и вихревыми токами. Эти потери — потери в стали — определяются свойствами стали. Они зависят от величины индукции магнитного поля и частоты перемагничивания, так как пропорциональны квадрату индукции магнитного поля и прямо пропорциональны частоте.
Механические потери слагаются из потерь механической энергии на трение в подшипниках (в контактных кольцах для машин с фазным ротором), а также на вентиляцию машины.
Процесс преобразования электрической энергии в полезную механическую энергию, развиваемую асинхронным двигателем, может быть описан уравнением баланса активной мощности. На основании закона сохранения и преобразования энергии можно записать

где Рх — мощность потребления электрической энергии; АР1э — мощность электрических потерь в обмотке статора; АР1маг|1 — мощность магнитных потерь в пакете магнитопровода статора; АРъ — мощность электрических потерь в обмотке ротора; ДР2магн — мощность магнитных потерь в пакете магнитопровода ротора; АРмех — мощность механических потерь; Р2 — полезная механическая мощность двигателя.
Уравнение (3.8.1) наглядно иллюстрируется диаграммой мощностей, представленной на рис. 3.8.1. Она дополнена структурной схемой асинхронного двигателя, которая указывает на характер связей, существующих меж-

Рис. 3.8.1. Диаграмма преобразования энергии в асинхронном двигателе
ду источником питания, статором электрической машины, ротором и рабочей машиной (станок, кран, насос и т.п.), приводимой в движение асинхронным двигателем. Источник питания и статор связаны между собой электрически, статор и ротор имеют магнитную, а ротор и рабочий механизм — механическую связь.
Из диаграммы рис. 3.8.1 следует, что мощность Рэм передачи энергии со статора на ротор, осуществляемой посредством вращающегося магнитного поля, всегда меньше активной мощности двигателя на значение мощности электрических и магнитных потерь в статоре:

Мощность Рш, называемую электромагнитной мощностью, можно выразить также через механические величины — угловую скорость С2, магнитного поля и электромагнитный момент М)м, создаваемый двигателем вследствие силового взаимодействия вращающегося магнитного поля с токами роторной обмотки. Возможность такого выражения электромагнитной мощности может быть обоснована с помощью модели асинхронного двигателя — магнитной муфты, показанной на рис. 3.8.2.

Рис. 3.8.2. Электромагнитная муфта
Здесь взамен статора с трехфазной обмоткой, возбуждающей основное вращающееся магнитное поле, применены эквивалентные постоянные магниты, вращаемые посторонним двигателем со скоростью Q,.
Как известно из курса теоретической механики, момент сил, действующих на равномерно вращающийся ротор, равен моменту сил, действующих на статор, или моменту сил, приложенных к полюсам вращаемого магнита. Отсюда мощность постороннего двигателя, вращающего магнитную муфту со скоростью D.р численно равна электромагнитной мощности:

Аналогично выражается механическая мощность Рмех ротора, вращающегося со скоростью Q9:

В инженерной практике большее применение имеет частота вращения п, об/мин, использование в формулах (3.8.2) и (3.8.3) угловой скорости Q, рад/с, предпочтительнее, гак как позволяет связать Р и М в основной системе единиц СИ без дополнительных коэффициентов.
Разность электромагнитной и механической мощностей равна мощности потерь в роторе машины. Поскольку мощность магнитных потерь в роторс мала по сравнению с мощностью электрических потерь (так как мала частота перемагничивания пакета ротора), ею пренебрегают и считают

Последнее равенство позволяет получить из формул (3.8.2) и (3.8.3) весьма важное для анализа работы асинхронных двигателей соотношение


Итак, мощность электрических потерь в роторе асинхронного двигателя пропорциональна скольжению.
Для ограничения электрических потерь в роторе двигателя его рассчитывают и конструируют таким образом, чтобы при номинальной нагрузке частота вращения ротора незначительно отличалась от частоты вращения магнитного поля, и, как уже отмечалось выше, номинальное скольжение равно нескольким процентам.
Полезная механическая мощность Р2 двигателя меньше механической мощности Рмех ротора на значение мощности механических потерь: Р2 = ^ех “ ЛРмех. Поэтому полезный момент (момент на валу двигателя, момент вращения М|ф) совсем немного меньше электромагнитного момента, создаваемого ротором Мэм, и при ДРмех= 0 эти моменты равны: Мэм = МщУ
Для асинхронных двигателей, как и для двигателя постоянного тока, вращающий момент Мир равен моменту нагрузки, т.е. моменту сопротивления Мс, и в этом случае возможно обозначение момента без индекса: М = Мэм = Мс.
В режиме разгона или торможения часть мощности расходуется на изменение запаса кинетической энергии, и часто используется понятие «динамический момент» Мдин. Динамический момент равен произведению углового ускорения и приведенного к валу двигателя момента инерции всех вращающихся частей:

При равномерном вращении отсутствует ускорение — динамический момент равен нулю.
Анализ процессов разгона и торможения (переходных процессов) невозможен без рассмотрения этой динамической составляющей момента нагрузки.
Следует иметь в виду, что в паспорте асинхронного двигателя, так же как и других электрических двигателях, в качестве номинальной мощности всегда указывается его полезная механическая мощность Р2, а не мощность потребления электрической энергии Р,. Отношение этих мощностей определяет КПД асинхронного двигателя:

Задание 3.8.1. Мощность магнитных потерь в пакете магнитопровода статора.
Варианты ответа:
- 1. Максимальна в режиме пуска двигателя.
- 2. Не зависит от нагрузки на валу.
- 3. Максимальна в режиме холостого хода двигателя.
Что такое асинхронный двигатель? Принцип его работы
Асинхронный двигатель — это асинхронное устройство, предназначенное для преобразования с минимальными потерями электрической энергии переменного тока в механическую энергию, необходимую для запуска работающих на этом двигателе приборов. Чтобы иметь более ясное представление о принципе работы [таких] асинхронных двигателей, необходимо познакомиться с устройством этого прибора, а также узнать, какие типы этих машин существуют на сегодняшний день.
Принцип магнетизма вращения был открыт еще в 1824 году французским физиком Д. Ф. Арагоном. В результате своих экспериментов, ученый обнаружил, что можно привести в движение медный диск, закрепленный на вертикальную ось, воздействуя на него постоянным магнитом. Работу над трудами Арагона продолжил английский физик Уильям Бейли в 1879 году. В своих экспериментах он воздействовал на медный диск четырьмя электромагнитами, подключенными к источнику постоянного тока. Однако законченную формулировку этому явлению дали в 1888 году итальянский физик Феррарис и Никола Тесла, работавшие независимо друг от друга.
В 1888 году Тесла представил миру свой первый опытный образец асинхронного двигателя. Однако широкое применение он не получил из-за низких технических показателей в момент запуска двигателя. Современная конструкция вращающего трансформатора, в том виде, в котором мы знаем его сегодня, была разработана французским инженером П. Бушеро, разработавшем аналог современного асинхронного двигателя.
Устройство асинхронного двигателя
Любой электродвигатель, независимо от мощности и габаритов, состоит из следующих элементов:
— Катушки статора и ротора;
 Ротор — это подвижный узел мотора, отвечающий за преобразование одной энергии в другую, посредством вращения ротора вокруг своей оси. Двигатели, работающие от переменного тока и получающие энергию при помощи магнитного поля и индукции, называются асинхронными. Они устроены по принципу вторичной обмотки трансформатора, благодаря чему второе их название — вращающие трансформаторы. Наибольшее распространение получили асинхронные двигатели с трехфазным включением.
Ротор — это подвижный узел мотора, отвечающий за преобразование одной энергии в другую, посредством вращения ротора вокруг своей оси. Двигатели, работающие от переменного тока и получающие энергию при помощи магнитного поля и индукции, называются асинхронными. Они устроены по принципу вторичной обмотки трансформатора, благодаря чему второе их название — вращающие трансформаторы. Наибольшее распространение получили асинхронные двигатели с трехфазным включением.
В основе устройства асинхронных двигателей лежит правило левой руки буравчика, которое демонстрирует взаимодействие магнитного поля и проводника, а также задает направление вращения электродвигателя.
Вторым законом, заложенным в устройство и работу вращающих трансформаторов, является закон электромагнитной индукции Фарадея, который гласит:
Электродвижущая сила, или сокращенно ЭДС, наводится в обмотке устройства, но электромагнитный поток постоянно изменяется во времени;
Электродвижущая сила изменяется в зависимости от изменения во времени электромагнитного потока.
ЭДС и электрический ток имеют противоположное направление движения.
Принцип работы асинхронного двигателя
Принцип работы и скольжения в асинхронных машинах переменного тока предельно прост. В электрической обмотке статора, при подаче на нее напряжения, создается магнитное поле. При подаче напряжения переменного тока происходит изменения магнитного потока, создаваемого статором. Таким образом, магнитное поле статора изменяется и магнитные потоки поступают на ротор, что приводит его в действие и заставляет вращаться. Однако для обеспечения асинхронной работы статора и ротора необходимо чтобы магнитный поток и напряжение статора было равно по величине переменному току. Это обеспечит возможность ее работы исключительно от источника переменного тока.
 Если асинхронный двигатель выполняет функцию генератора, то он будет вырабатывать постоянный ток. В этом случае вращение ротора 13831452671457будет обеспечиваться благодаря воздействию внешних источников, например, турбиной. Если в устройстве ротора присутствует так называемый остаточный магнетизм, то он будет обладать определенными магнитными свойствами, которые присущи магниту. В этом случае в стационарной обмотке статора будет вырабатываться переменный поток. Таким образом, наведенное напряжение будет поступать в обмотки катушек статора по принципу магнитной индукции.
Если асинхронный двигатель выполняет функцию генератора, то он будет вырабатывать постоянный ток. В этом случае вращение ротора 13831452671457будет обеспечиваться благодаря воздействию внешних источников, например, турбиной. Если в устройстве ротора присутствует так называемый остаточный магнетизм, то он будет обладать определенными магнитными свойствами, которые присущи магниту. В этом случае в стационарной обмотке статора будет вырабатываться переменный поток. Таким образом, наведенное напряжение будет поступать в обмотки катушек статора по принципу магнитной индукции.
Область применения индукционных генераторов достаточно широка. Их используют для обеспечения резервным источником электрического питания небольших магазинчиков и частных домов. Это одни из самых дешевых и простых в установке и эксплуатации типов радиаторов. В последние годы все активнее индукционные генераторы применяются во многих странах по всему миру, в которых существует проблема, связанная с постоянными перепадами напряжения в электрической сети. В процессе работы генератора, ротор приводится в движение благодаря дизельному двигателю небольшой мощности, подключенному к асинхронному генератору.
Принцип вращения ротора
Принцип работы ротора основан на электромагнитном законе Фарадея. Вращается он благодаря воздействию электродвижущей силы, возникающей в результате взаимодействия магнитных потоков и обмотки ротора. На деле это выглядит так: между статором, ротором и их обмотками существует некий зазор, сквозь который проходит вращающийся магнитный поток. В результате этого в проводниках ротора возникает напряжение, которое и является причиной образования ЭДС.
Двигатели с замкнутой цепью роторных проводников работают немного иначе. В этих типах двигателей используются короткозамкнутые роторы, в которых направление движения тока и электродвижущей силы задается правилом Ленца, согласно которому ЭДС противодействует возникновению тока. Вращение ротора происходит благодаря магнитному потоку, движущемуся между ним и неподвижным проводником.
Таким образом, для уменьшения относительной скорости, ротор начинает синхронное вращение с магнитным потоком на обмотке статора, стремясь к вращению в унисон. При этом частота электродвижущей силы ротора равняется частоте питания статора.
Гребневые асинхронные двигатели
 При подаче низкого напряжения питания на короткозамкнутый ротор, не происходит возбуждения его обмоток. Это происходит из-за того, что ротор и статор имеют одинаковое число зубьев, в результате чего магнитная фиксация между ними равна, что вызывает их взаимную нейтрализацию. В физике это явление называется зубо-блокировкой или магнитной блокировкой. Для того чтобы решить эту проблему, достаточно всего — лишь увеличить количество зубьев на статоре или роторе.
При подаче низкого напряжения питания на короткозамкнутый ротор, не происходит возбуждения его обмоток. Это происходит из-за того, что ротор и статор имеют одинаковое число зубьев, в результате чего магнитная фиксация между ними равна, что вызывает их взаимную нейтрализацию. В физике это явление называется зубо-блокировкой или магнитной блокировкой. Для того чтобы решить эту проблему, достаточно всего — лишь увеличить количество зубьев на статоре или роторе.
Принцип подключения асинхронных двигателей
В любой момент времени работу асинхронного двигателя можно остановить. Для этого достаточно всего — лишь поменять местами любые два вывода статора. Это может понадобиться при возникновении различного рода чрезвычайных ситуаций. После этого происходит противофазное торможение, происходящее в результате изменения направления вращающегося потока, что прекращает подачу электропитания ротора.
Чтобы избежать возникновения такой ситуации, в однофазных асинхронных двигателях используют специальные конденсаторные устройства, подключающиеся к пусковой обмотке двигателя. Однако перед использованием этих устройств, необходимо рассчитать оптимальные для работы параметры. При этом следует учитывать, что мощность конденсаторов, используемых в одно- или двухфазных электрических машинах переменного тока, должна равняться мощности самого двигателя.
Принцип муфты
Рассматривая технические характеристики вращающихся трансформаторов переменного тока, применяемых в производстве промышленного оборудования, и их принцип действия, можно обнаружить аналогию с принципом работы вращающейся муфты механического сцепления. Значение крутящего момента на валу привода должно соответствовать величине этого значения на ведомом валу. Помимо этого очень важно понимать, что эти два момента идентичны друг другу. Поскольку линейный преобразователь приводится в движение под воздействием терния между дисков, находящихся внутри муфты.
Электромагнитная муфта сцепления
 Похожая технология реализована и в тяговом двигателе, в котором используются фазовые роторы. Система этих моторов состоит из остовы и 4 основных, и 4 добавочных полюсов. Основные полюса представляют из себя медные катушки, которые начинают вращение благодаря зубчатой передаче, приводимой в движение сердечником также называемом, валовым якорем. Запитка от сети происходит благодаря четырем гибким кабелям. Основная область применения многополюсных двигателей — тяжелое машиностроение. Они выступают движущей силой для крупной сельскохозяйственной техники, железнодорожного транспорта и станков для некоторых типов промышленности.
Похожая технология реализована и в тяговом двигателе, в котором используются фазовые роторы. Система этих моторов состоит из остовы и 4 основных, и 4 добавочных полюсов. Основные полюса представляют из себя медные катушки, которые начинают вращение благодаря зубчатой передаче, приводимой в движение сердечником также называемом, валовым якорем. Запитка от сети происходит благодаря четырем гибким кабелям. Основная область применения многополюсных двигателей — тяжелое машиностроение. Они выступают движущей силой для крупной сельскохозяйственной техники, железнодорожного транспорта и станков для некоторых типов промышленности.
Плюсы и минусы асинхронных двигателей
Вращающие трансформаторы получили большую популярность благодаря своей универсальности, позволяющей использовать их во многих отраслях. Однако эти механизмы, как и любые другие устройства, имеют свои достоинства и недостатки. Давайте подробнее разберемся с каждым из них.
Достоинства вращающих трансформаторов переменного тока:
1. Простая конструкция двигателя;
2. Дешевая себестоимость приборов;
3. Высокие эксплуатационные характеристики;
4. Простое управление конструкцией;
5. Возможность работы в тяжелых условиях.
Высокая производительность асинхронных двигателей переменного тока достигается благодаря высокой мощности, потери которой минимизированы благодаря отсутствию трения в процессе их работы.
К недостаткам вращающих трансформаторов можно отнести:
1. Потеря мощности при изменении скорости.
2. Снижение крутящего момента при увеличении нагрузки.
3. Низкая мощность в момент запуска.
Асинхронный двигатель
Среди устройств, преобразующих электрическую энергию в механическую, несомненным лидером является трехфазный асинхронный двигатель – простой и надежный в эксплуатации агрегат. Благодаря своим качествам, он получил широкое применение в промышленности и других областях, где используются механизмы. Название двигателя связано с основным принципом его работы. У этих устройств магнитное поле статора вращается с частотой, превышающей частоту вращения ротора. Работа агрегата осуществляется от сети переменного тока.
- Где применяются
- Устройство асинхронного двигателя
- Принцип работы
- Что такое скольжение
Где применяются
Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции.
Асинхронные двигатели обладают множеством положительных качеств. Простая конструкция позволяет изготавливать наиболее дешевые и надежные устройства. Минимальные расходы по эксплуатации обеспечиваются отсутствием скользящего узла токосъема, что одновременно повышает и надежность агрегата.
Данный тип электродвигателей может быть трехфазным или однофазным, в зависимости от количества питающих фаз. В случае необходимости и при соблюдении определенных условий, трехфазный агрегат может питаться и работать от однофазной сети. Эти устройства применяются не только в промышленности, но и в бытовых условиях, а также на садовых участках или домашних мастерских. Однофазные двигатели обеспечивают работу и вращение вентиляторов, стиральных машин, небольших станков, водяных насосов и электроинструмента.
Для нормального действия асинхронного агрегата необходимо выбирать наиболее рациональную схему управления. Трехфазный двигатель будет работать в однофазном режиме при условии правильного расчета конденсаторов, выбора типа и сечения проводов, аппаратуры защиты и управления.
Устройство асинхронного двигателя
Понятие асинхронный означает не совпадающий по времени, неодновременный. В связи с этим, ротор такого двигателя вращается с частотой, меньшей чем частота вращения электромагнитного поля статора.
Подобное отставание называется скольжением и обозначается символом S в формуле, применяемой для расчетов:
- S = (n1 – n2)/n1 – 100%, где n1 является синхронной частотой магнитного поля статора, а n2 – частотой вращения вала.
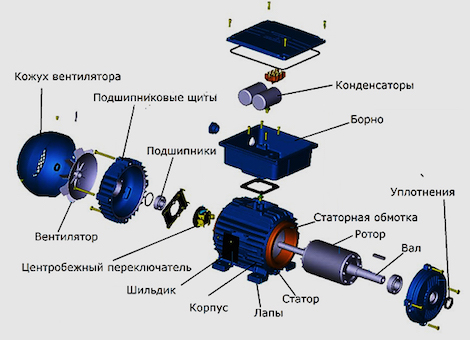
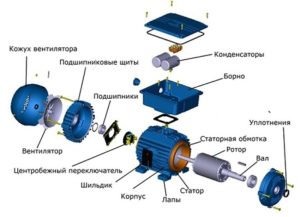
Конструктивно, стандартный асинхронный электродвигатель включает в себя следующие элементы и детали:
- Статор с обмотками. Эту функцию также может выполнять станина, внутри которой помещается статор с обмотками.
- Короткозамкнутый ротор. Если используется фазный – он может называться якорем или коллектором.
- Подшипники различного типа – качения или скольжения. На двигателях повышенной мощности в передней части установлены крышки для подшипников с уплотнениями.
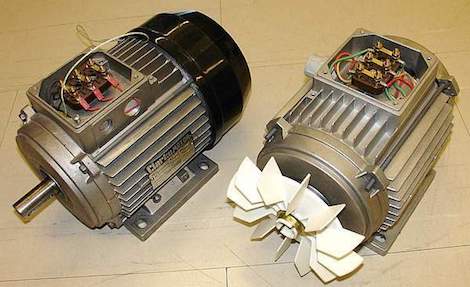
- Металлический или пластмассовый охлаждающий вентилятор, помещенный в кожух с прорезями для подачи воздуха.
- Подключение кабелей осуществляется с помощью клеммной коробки.
Данные конструктивные элементы могут незначительно изменяться, в зависимости от модификации электродвигателя.
Как уже отмечалось, асинхронные двигатели бывают трехфазными или однофазными. Первый вариант, в свою очередь, выпускается с короткозамкнутым или фазным ротором. Наибольшее распространение получили трехфазные асинхронные электродвигатели с короткозамкнутым ротором, поэтому их следует рассмотреть более подробно.
Статор обладает круглой формой и собирается из специальных стальных листов, изолированных между собой. В результате, конструктивно образуется сердечник с пазами, в которые укладываются обмотки. Для этих целей используется обмоточный медный провод, изолированный лаком. В мощных агрегатах обмотки делаются в виде шины. При укладке они сдвигаются между собой на 120 градусов. Соединение осуществляется по схеме звезды или треугольника.
Конструкция самого короткозамкнутого ротора изготавливается в виде вала с надетыми на него стальными листами. Этот набор листов образует сердечник с пазами, заливаемые расплавленным алюминием. Равномерно растекаясь по пазам, алюминий образует стержни, края которых замыкают алюминиевые кольца.
Фазный ротор состоит из вала с сердечником и трех обмоток. С одного конца они соединяются звездой, а с другого – соединяются с токосъемными кольцами, на которые с помощью щеток подается электрический ток. Во время запуска образуется большой пусковой ток асинхронного двигателя. Его можно уменьшить путем добавления к фазным обмоткам нагрузочного реостата.
Принцип работы
Устройство и конструктивные особенности асинхронного двигателя определяют и принцип действия данного агрегата. Когда на обмотку статора подается напряжение, в ней образуется магнитное поле. Такая подача напряжения приводит к изменениям магнитного потока и всего магнитного поля статора. Измененные магнитные потоки поступают к ротору, приводят его в действие, после чего он начинает вращаться. Для того чтобы статор и ротор работали асинхронно, требуется, чтобы значения напряжения и магнитного потока были равны переменному току, используемому в качестве источника питания.
Сам двигатель работает следующим образом:
- Вращающееся магнитное поле воздействует на короткозамкнутую обмотку, специально приспособленную для вращения.
- Поле пересекает проводники роторной обмотки, индуктируя в них электродвижущую силу.
- Под воздействием силы в проводниках ротора начнется течение электрического тока, взаимодействующего с вращающимся магнитным полем. Это приводит к появлению электромагнитных сил, воздействующих на обмотку ротора.
- В сумме, действия приложенных сил вызывают появление вращающего момента, приводящего во вращение ротор в направлении магнитного поля.
Величина индуктированной ЭДС зависит от частоты пересечения проводников вращающимся магнитным полем. То есть, чем выше разница между n1 и n2, тем больше будет величина ЭДС. Ротор будет вращаться с частотой n2, которая всегда будет отставать от синхронной частоты поля статора n1. Эта разница между обеими частотами и будет частотой скольжения ∆n= n1- n2. Данное неравенство является необходимым условием появления электромагнитного вращающегося момента в асинхронном двигателе. Поэтому агрегат так и называется, поскольку вращение ротора происходит несинхронно с полем статора.
Что такое скольжение
Понятие скольжения представляет собой отношение частоты вращения к частоте поля. Данная величина S берется в процентном отношении от частоты вращения магнитного поля. В соответствии с формулой, рассмотренной ранее, частота вращения ротора, определяемая с помощью скольжения составит: n2 = n1 x (1 – S).
Ротор асинхронного двигателя вращается в том же направлении, что и его магнитное поле. В свою очередь, направление вращения поля зависит от последовательности фаз трехфазной сети. Изменить направление вращения ротора возможно за счет изменения направления вращения поля, создаваемого статором. В этом случае изменяется порядок поступления импульсов тока к отдельным обмоткам. В случае необходимости может быть задано вращение по часовой или против часовой стрелки.
Важным моментом считается пуск асинхронного двигателя, при котором происходит пересечение обмотки ротора вращающимся магнитным полем. В результате, индуктируется большая ЭДС, создающая высокий пусковой ток. Подобное состояние компенсируется специальной нагрузкой, снижающей скорость вращения ротора.

Синхронный и асинхронный двигатель
Работа асинхронного двигателя в генераторном режиме
Асинхронный двигатель с короткозамкнутым ротором схема
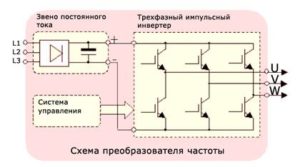
Принцип работы частотного преобразователя для асинхронного двигателя
Для преобразования какой энергии предназначены асинхронные двигатели?
Асинхронный двигатель — принцип работы устройства, схема частотного преобразователя

Современное промышленное производство, как постоянно динамично развивающаяся система, требует применения для решения различных задач новых и инновационных технических решений. Вместе с тем, многие производства и сейчас используют в качестве двигателей станков, машин и различных механизмов старых надежных асинхронных двигателей.
Среди применяемых в производстве электронных систем и электрических машин, особое место занимает асинхронный двигатель – электрическая с электронным блоком управления машина, использующая переменный ток для преобразования электрической энергии в механическую.
Более глубокое раскрытие этого понятия основано на принципе использования магнитного поля для создания вращательного движения – статор создает магнитное поле, несколько большее по частоте, чем частота магнитного поля вращающегося ротора.
Магнитное поле заставляет вращаться ротор, при этом, его частота вращения несколько меньше, чем изменение магнитного поля статора, он как бы пытается догнать образовываемое статором поле.
Двигатели такого принципа являются наиболее распространенными видами электрических машин – это наиболее простой и экономичный тип преобразования электрической энергии переменного тока во вращательную механическую энергию.
Как и у большинства технически сложных механизмов, у таких моторов есть масса положительных сторон, главная из которых является отсутствие электрического контакта между подвижными и неподвижными частями машины.
Это достоинство асинхронников и является основным при выборе моделей двигателей в конструкторских разработках – отсутствие коллектора и щеток, контакта между статором и ротором значительно повышают надежность и удешевляют производство таких моторов.
Однако, следует заметить, что это правило справедливо только к одному из видов (хотя и наиболее распространенному виду) – двигателям с короткозамкнутым ротором.
Описание схемы
Работу асинхронного электродвигателя, предназначенного для обычной электросети переменного электрического тока можно описать следующей схемой:
- На обмотки статора двигателя подается переменный электрический ток от каждой фазы (в случае, если двигатель трехфазный, если ток однофазный, то включение остальных обмоток происходит посредством включения в схему пусковых конденсаторов, играющих роль имитации трехфазной сети).
- В результате подачи напряжения, в каждой из имеющихся обмоток создается электрическое поле с частотой напряжения, и поскольку они имеют смещение на 120 градусов относительно друг друга, то происходит смещение подачи как во времени (даже ничтожно малого), так и в пространстве (тоже достаточно небольшого).
- Получившийся в результате вращающийся магнитный поток статора своей силой создает в роторе, вернее в его проводниках, электродвижущую силу.
- Созданный в статоре магнитный поток, взаимодействуя с магнитным полем ротора, создает пусковой момент – магнитное поле которого стремится повернуться в направлении магнитного поля статора.
- Магнитное поле постепенно нарастая и превышая так называемый тормозной момент, проворачивает ротор.
Таким образом, схемой работы асинхронного агрегата, является взаимодействие магнитного поля статора и токов, которые образуются этим самым магнитным полем в роторе двигателя.
Устройство
Наиболее наглядно представить конструкцию агрегата можно на примере асинхронного двигателя, имеющего короткозамкнутый ротор, второй вид электромоторов имеет несколько иную конструкцию, это вызвано тем, что они используют промышленную сеть в 380 Вольт.
Основными составными частями такой электрической машины являются статор и ротор, которые не соприкасаются между собой и имеют воздушный зазор. Такая конструкция основных частей связана с тем, что в состав обеих основных частей электромотора входят так называемые активные части – состоящие из металлического проводника обмотка возбуждения.
Для каждой части имеются своя соответственно статорная и роторная обмотки и стальной сердечник – магнитопровод. Это основные части электродвигателя, принципиально необходимые для работы машины, все остальные части – корпус, подшипники качения, вал, вентилятор – это конструктивно необходимые, но абсолютно не влияющие на принцип работы прибора.
Они во многом играют важную роль, например, подшипники качения, обеспечивают возможность плавности хода, корпус защищает от механического воздействия на основные рабочие части, вентилятор обеспечивает обдув двигателя и отвод тепла, выделяемого при работе, но на принцип преобразования электрической энергии в механическую не влияют.
Итак, основными частями асинхронного электромотора, как электрической машины являются:
- Статор – основной элемент электромотора, состоящая из трехфазной (или многофазной) обмотки. Особенностью обмотки является определенный порядок расположения витков – проводники равномерно расположены в пазах, имеющих угол 120 градусов по всей окружности.
- Ротор – второй основной элемент агрегата, представляющий собой цилиндрический сердечник с залитыми алюминием пазами. Такая конструкция из-за своей особенности называется «беличья клетка» или короткозамкнутым типом ротора. В ней медные стержни замкнуты на концах кольцом с обеих сторон цилиндра.
Кроме самого простейшего вида асинхронного электромотора с простым ротором, к семейству асинхронных двигателей относятся и машины, которые имеют более сложную конструкцию, обмотки, у которых имеются как у статора, так и ротора.
Трехфазные обмотки, а конструктивно их по одной на каждую фазу, соединяются подобно обмоткам статора или «звездой» или «треугольником», и концы обмоток этих выводятся на контактные кольца, которые вращаются на валу, электрический ток на них передается через щетки из графита. Этот тип электродвигателей имеет большую мощность и применяется уже в промышленных машинах и станках.
Область применения
В виду особенности конструкции и простоты изготовления, подобные электромоторы нашли основное применение в машинах и механизмах в которых не требуется большое усилие и мощность при работе.
В основном, такие моторы устанавливаются практически на всех бытовых приборах:
- мясорубки;
- фены;
- электрические миксеры;
- бытовые вентиляторы;
- небольшие маломощные бытовые станки;
Трехфазные асинхронные моторы имеют различную мощность, от 150 Вт до нескольких киловатт, и применяются в основном в промышленности в качестве моторов для машин и механизмов.
Применение подобного типа моторов обусловлено приемлемым с точки зрения соотношения мощность/производительность, к тому же, как и их простейшие собраться такие двигатели не требуют большого внимания и кропотливого обслуживания, в особенности те типы корпуса, которые специально разработаны для работы в тяжелых условиях производства.
В виду различных конструкторских задач, стоящих перед разрабатываемыми машинами и механизмами в промышленном, серийном производстве, нашли свое применение асинхронные линейные электромоторы основных четырех видов:
Моторы для однофазной сети
С короткозамкнутым ротором.
Асинхронные двигатели
Асинхронный электродвигатель — электрическая асинхронная машина для преобразования электрической энергии в механическую. Принцип работы А. Э. основан на взаимодействии вращающегося магнитного поля, возникающего при прохождении трёхфазного переменного тока по обмоткам статора, с током, индуктированным полем статора в обмотках ротора, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля при условии, что частота вращения ротора n меньше частоты вращения поля n1 .Т. о., ротор совершает асинхронное вращение по отношению к полю.
Впервые явление, названное магнетизмом вращения, продемонстрировал французский физик Д. Ф. Араго (1824). Он показал, что укрепленный на вертикальной оси медный диск начинает вращаться, если вращать над ним постоянный магнит. Спустя 55 лет, 28 июня 1879, английский учёный У. Бейли получил вращение магнитного поля поочерёдным подключением обмоток 4 стержневых электромагнитов к источнику постоянного тока. В работах М. Депре (Франция, 1880—1883), И. Томсона (США, 1887) и др. описываются устройства, основанные также на свойствах вращающегося магнитного поля. Однако строгое научное изложение сущности этого явления впервые, практически одновременно и независимо друг от друга, было дано в 1888 итальянским физиком Г. Феррарисом и хорватским инженером и учёным Н. Тесла.
Двухфазный А. э. был изобретён Н. Тесла в 1887 (английский патент № 6481), публичное сообщение об этом изобретении он сделал в 1888. Распространения этот тип А. э. не получил главным образом из-за плохих пусковых характеристик. В 1889 М. О. Доливо-Добровольский испытал сконструированный им первый в мире трёхфазный А. э., в котором применил ротор типа «беличье колесо» (германский патент № 51083), а обмотку статора разместил в пазах по всей окружности статора. В 1890 Доливо-Добровольский изобрёл фазный ротор с кольцами и пусковыми устройствами (патенты английский № 20425 и германский № 75361). Через 2 года им же была предложена конструкция ротора, названная «двойной беличьей клеткой», которую, однако, стали широко применять только с 1898 благодаря работам французского инженера П. Бушеро, представившего А. э. с таким ротором, как двигатель со специальными пусковыми характеристиками.
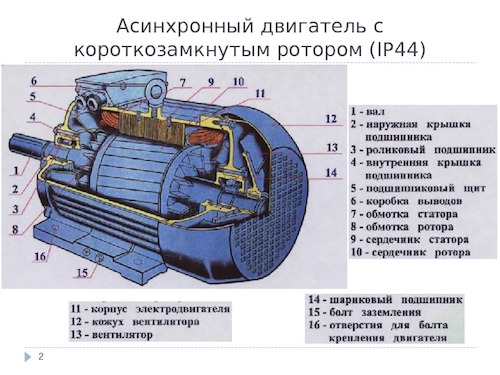
Конструктивное оформление А. э., их мощность и габариты зависят от назначения и условий работы.
Например, двигатели с воздушным и водяным охлаждением (общего применения); герметичные, маслонаполненные (для электробуров) и взрывобезопасные (для работы в шахтах, взрывоопасных помещениях и др.); пыле-, брызгозащищённые (для применения в морских условиях и тропическом климате) и т. д. Некоторые виды А. э. (например, шаговые, для следящих систем, схем автоматики и телемеханики, со ступенчатой регулировкой скорости и пр.) разрабатываются и выпускаются комплектно с блоками управления и пускозащитной аппаратурой, с встроенными редукторами. Трёхфазные А. э. сравнительно с однофазными обладают лучшими пусковыми и рабочими характеристиками. Основные конструктивные элементы А. э.: статор — неподвижная часть (рис.1 а) и ротор — вращающаяся часть (рис.1 б, в). В соответствии со способом выполнения роторной обмотки А. э. делятся на двигатели с контактными кольцами и короткозамкнутые. Воздушный зазор между статором и ротором у А. э. делается по возможности малым (до 0,25 мм). Частота вращения ротора А. э. зависит от частоты вращения магнитного поля статора и определяется частотой питающего тока и числом пар полюсов двигателя.
Рис.1
При пуске А. э. с короткозамкнутым ротором возникает пусковой ток, сила которого превышает силу номинального тока в 4—7 раз. Поэтому прямое включение в сеть применяется только для двигателей мощностью до 200 квт. Более мощные А. э. с короткозамкнутым ротором включают сперва на пониженное напряжение, чтобы сила пускового тока снизилась в 3—4 раза. С этой же целью применяют пуск А. э. через автотрансформатор, включенный на время пуска последовательно с обмоткой статора. Силу пускового тока двигателей с фазным ротором ограничивают пусковым сопротивлением в цепи ротора, которое в процессе разбега ротора постепенно уменьшают. После запуска А. э. обмотку ротора замыкают накоротко. Для уменьшения потерь на трение и износа щёток их обычно поднимают щёткоподъёмным приспособлением, которое перед этим замыкает накоротко обмотку ротора через кольца.
Частоту вращения А. э. регулируют в основном изменением числа пар полюсов, сопротивления, включенного в цепь ротора, изменением частоты питающего тока, а также каскадным включением нескольких машин. Направление вращения А. э. изменяют переключением любых двух фаз обмотки статора.
А. э. благодаря простоте в производстве и надёжности в эксплуатации широко применяют в электрическом приводе. Основные недостатки А. э. — ограниченный диапазон регулирования частоты вращения и значительное потребление реактивной мощности в режиме малых нагрузок. Создание регулируемых статических полупроводниковых преобразователей частоты существенно расширяет область применения А. э. в автоматических регулируемых электроприводах.
Конденсаторный асинхронный двигатель
1) асинхронный электродвигатель, питаемый от однофазной сети и имеющий на статоре две обмотки, одна из которых включается в сеть непосредственно, а другая — последовательно с электрическим конденсатором для образования вращающегося магнитного поля. Конденсаторы создают сдвиг фаз между токами обмоток, оси которых сдвинуты в пространстве. Наибольший вращающий момент развивается, когда сдвиг фаз токов составляет 90°, а их амплитуды подобраны так, что вращающееся поле становится круговым. При пуске К. а. д. оба конденсатора включены, а после его разгона один из конденсаторов отключают; это обусловлено тем, что при номинальной частоте вращения требуется значительно меньшая емкость, чем при пуске. К. а. д. по пусковым и рабочим характеристикам близок к трёхфазному асинхронному двигателю. Применяется в электроприводах малой мощности; при мощностях свыше 1 квт используется редко вследствие значительной стоимости и размеров конденсаторов.
2) Трёхфазный асинхронный электродвигатель, включаемый через конденсатор в однофазную сеть. Рабочая ёмкость конденсатора для 3-фазного двигателя определяется по формуле Ср = 2800  ( мкф ) , если обмотки соединены по схеме «звезда», или Ср = 4800 ( мкф ) , если обмотки соединены по схеме «треугольник». Ёмкость пускового конденсатора Сп =(2,5 — 3) × Ср . Рабочее напряжение конденсаторов должно быть в 1,5 раза выше напряжения сети; конденсаторы устанавливаются обязательно бумажные.
( мкф ) , если обмотки соединены по схеме «звезда», или Ср = 4800 ( мкф ) , если обмотки соединены по схеме «треугольник». Ёмкость пускового конденсатора Сп =(2,5 — 3) × Ср . Рабочее напряжение конденсаторов должно быть в 1,5 раза выше напряжения сети; конденсаторы устанавливаются обязательно бумажные.
Рис 2. Схема (а) и векторная диаграмма (б) конденсаторного асинхронного двигателя: U, UБ, UC — напряжения; IA, IБ — токи; А и Б — обмотки статора; В — центробежный выключатель для отключения С1 после разгона двигателя; C1 и C2 — конденсаторы.
Рис 3. Схема включения в однофазную сеть трёхфазного асинхронного двигателя с обмотками статора, соединёнными по схеме «звезда» (а) или «треугольник» (б): B1 Переключатель направления вращения (реверс), В2 — Выключатель пусковой ёмкости; Ср — рабочий конденсатор; Cп — пусковой конденсатор; АД — асинхронный электродвигатель.