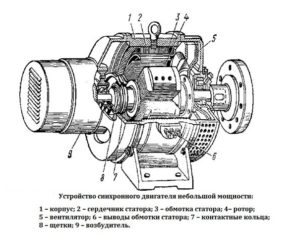
Из чего состоит синхронный двигатель?
Из чего состоит синхронный двигатель?
Синхронный двигатель. Устройство синхронной машины. Работа синхронного двигателя. Сравнение синхронных и асинхронных двигателей
Синхронные машины используются в качестве источников электрической энергии (генераторов), электродвигателей и синхронных компенсаторов. Именно с помощью синхронных трехфазных генераторов вырабатывается электрическая энергия на электростанциях.
Синхронные двигатели в силу особых свойств, не получили широкого распространения. Синхронные трехфазные двигатели применяются обычно лишь в установках средней и большой мощности при редких пусках, в случаях, когда не требуется электрического регулирования скорости.
Наряду с этим, в системах управления, измерения, записи и воспроизведения звука, особенно для привода лентопротяжных и регистрирующих устройств, широко применяются синхронные микродвигатели.
Трехфазные синхронные генераторы, двигатели и синхронные компенсаторы в принципе имеют одинаковое устройство.
Устройство синхронной машины

Рис. 1 Устройство синхронной машины с неявно выраженными полюсами (а) и ротора машины с явно выраженными полюсами (б)
Неподвижная часть машины, называемая статором или якорем (рис. 1, а), состоит из стального или чугунного корпуса 1, в котором закреплен цилиндрический сердечник 2 якоря.
Для уменьшения потерь на перемагничивание и вихревые токи сердечник набирают из листов электротехнической стали. В пазах сердечника якоря уложена трехфазных обмотка 3. В подшипниковых щитах, прикрепленных с торцевых сторон к корпусу, либо в стояках, закрепленных на фундаменте, расположены подшипники, несущие вал 4 вращающейся части машины – ротора или индуктора. На валу размещен цилиндрический сердечник 7 ротора, выполняемый из сплошной стали. В пазах сердечника ротора уложена обмотка возбуждения 8, питаемая постоянным током. Для присоединения обмотки возбуждения к внешней электрической цепи на валу укрепляют два изолированных друг от друга и от вала контактных кольца 6, к которым пружинами прижимаются неподвижные щетки 5. Обмотка 8 служит для возбуждения основного магнитного поля машины. Обмотка возбуждения с сердечником ротора представляют собой по существу электромагнит. Питание обмотки возбуждения осуществляется либо от генератора постоянного тока, вал которого механически связан с валом синхронной машины, либо через вентили от источника переменного тока. Мощность, необходимая для питания обмотки возбуждения, невелика и составляет 1 ÷ 3% от мощности машины.
На рис. 1, а показана двухполюсная синхронная машина с неявно выраженными полюсами ротора. Такие машины изготовляют на скорости 3000 об/мин. Синхронные машины, предназначенные для работы с меньшими скоростями (1500, 1000, 750 об/мин и т. д.), имеют явно выраженные полюса, число которых тем больше, чем меньше скорость. На рис. 1, б показано устройство ротора четырехполюсной машины с явно выраженными полюсами. Явно выраженные полюса 1 изготовляют из отдельных стальных листов или реже массивными и закрепляют на ободе 2 ротора с помощью винтов. Отдельные части (катушки) обмотки возбуждения 3, расположенные на явно выраженных полюсах, соединены между собой так, что северные и южные полюса чередуются.
Трехфазная обмотка якоря синхронных машин выполняется таким образом, что возбуждаемое ею вращающееся магнитное поле имеет всегда такое же число полюсов, как ротор.
Работа синхронного двигателя
При работе синхронной машины в качестве двигателя обмотка якоря подключается к трехфазному источнику переменного тока, в результате чего возникает вращающийся магнитный поток якоря Фя.
После разгона ротора двигателя до скорости n ≈ n0 его обмотка возбуждения подключается к источнику постоянного тока, и возникает магнитный поток Ф0. Благодаря взаимодействию вращающегося магнитного потока Фя и проводников обмотки ротора, питаемой постоянным током (или потоков Фя и Ф0) возникает вращающий момент, действующий на ротор, и он втягивается в синхронизм, т. е. начинает вращаться со скоростью n, равной скорости n0 вращающегося магнитного поля якоря.
При изменении нагрузки двигателя скорость вращения ротора остается постоянной (n = n0), однако положение ротора относительно вращающегося магнитного потока Фя изменяется. Так, при моменте статического сопротивления Мс = 0 ротор занимает положение относительно потока Фя, показанное на рис. 2, а.

Рис. 2 Возникновение крутящего момента синхронного двигателя
Момент двигателя в этом случае М = Мс = 0. Увеличение момента сопротивления Мс приводит к такому смещению ротора относительно потока Фя, при котором возникает вращающий момент М двигателя, уравновешивающий момент Мс (рис. 2, б)
Существенной особенностью синхронного двигателя является то, что вращающий момент возникает у него в том случае, когда скорость вращения ротора n равна скорости n0 вращающегося магнитного поля якоря Фя. Возникновение вращающего момента при равенстве скоростей n и n0 у синхронного двигателя объясняется тем, что ток в его обмотке возбуждения появляется вследствие питания обмотки возбуждения от источника постоянного тока.
Скорость вращающегося магнитного поля якоря, а значит, ротора синхронного двигателя определяется по формуле
Для получения различных скоростей синхронные двигатели изготовляют с различными числами пар полюсов p.
При частоте f = 50 Гц скорости вращения синхронных двигателей будут равны 3000, 1500, 1000, 755 об/мин и т. д.
Сравнение синхронных и асинхронных двигателей
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные двигатели дают возможность регулировать частоту вращения различными способами (изменением числа пар полюсов, измерением частоты напряжение источника питания). Синхронные двигатели относятся к двигателям с нерегулируемой частотой вращения.
Воздействуя на ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности. Можно, в частности, заставить синхронный двигатель работать с cosφ = 1, а также с опережающим током. Последнее может быть использовано для улучшения коэффициента мощности других потребителей, питающихся от той же сети. В отличие от этого асинхронный двигатель представляет собой активно-индуктивную нагрузку и имеет всегда cosφ Другие новости по теме:
Синхронный электродвигатель с обмоткой возбуждения
- Прямой запуск
- Выход из синхронизма
- Синхронный компенсатор
Конструкция синхронного электродвигателя с обмоткой возбуждения
Синхронный электродвигатель с обмоткой возбуждения, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с обмоткой возбуждения. Обмотка возбуждения соединена с контактными кольцами к которым через щетки подходит питание.

Принцип работы
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье «Трехфазный асинхронный электродвигатель».

Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле создаваемое вокруг ротора возбуждаемое постоянным током показано ниже. Очевидно, что ротор ведет себя как постоянный магнит, так как имеет такое же магнитное поле (в качестве альтернативы можно представить, что ротор сделан из постоянных магнитов). Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим вы придали ротору начальное вращение в том же направлении как у вращающегося магнитного поля. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу и они будут сцепляться с помощью магнитных сил. Это значит, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.

Синхронная скорость
Скорость с которой вращается магнитное поле может быть вычислена по следующему уравнению:
 ,
,
- где Ns – частота вращения магнитного поля, об/мин,
- f – частота тока статора, Гц,
- p – количество пар полюсов.
Это значит, что скорость синхронного электродвигателя может очень точно контролироваться изменением частоты питающего тока. Таким образом эти электродвигатели подходят для высокоточных приложений.
Прямой запуск синхронного двигателя от электрической сети
Почему синхронные электродвигатели не запускаются от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля, и начнет двигаться в том же направлении. Но так как ротор имеет определенный момент инерции, его стартовая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля будет замещен северным полюсом. Таким образом появятся отталкивающие силы. В результате чего ротор начнет вращаться в обратную сторону. Таким образом ротор не сможет запуститься.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного электродвигателя без системы управления между наконечниками ротора размещается «беличья клетка», которая также называется демпферной обмоткой. При запуске электродвигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля, индуцируется ток в витках «беличьей клетки» и ротор начинает вращаться подобно тому, как запускаются асинхронные двигатели.
Когда ротор достигает своей максимальной скорости, подается питание на обмотку возбуждения ротора. В результате, как говорилось ранее, полюса ротора сцепляются с полюсами вращающегося магнитного поля и ротор начинает вращаться с синхронной скоростью. При вращении ротора с синхронной скоростью, относительное движение между белечьей клеткой и вращающимся магнитным полем равно нулю. Это значит, что отсутствует ток в короткозамкнутых витках, а следовательно «беличья клетка» не оказывает воздействия на синхронную работу электродвигателя.
Выход из синхронизма
Синхронные электродвигатели имеют постоянную скорость независящую от нагрузки (при условии что нагрузка не превышает макимально допустимую). Если момент нагрузки больше, чем момент создаваемый самим электродвигателем, то он выйдет из синхронизма и остановиться. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причинами выхода двигателя из синхронизма.
Синхронный компенсатор
Синхронные электродвигатели могут также использоваться для улучшения коэффициента мощности системы. Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
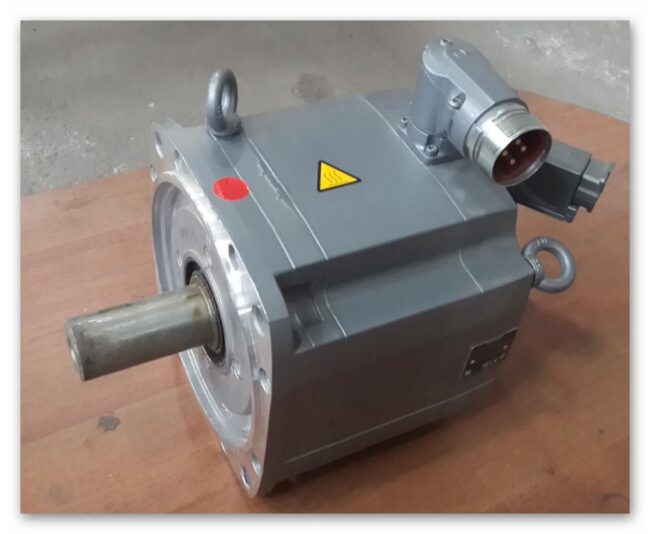
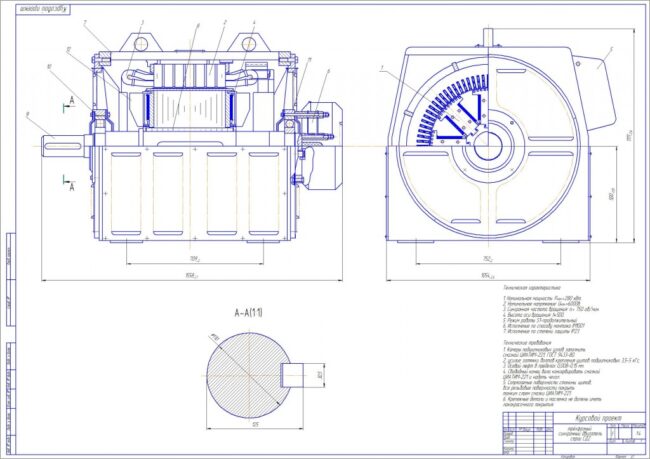
Что собой представляет синхронный двигатель: его конструкция, назначение и применение

В отличие от асинхронных электрических двигателей с короткозамкнутым статором, синхронные машины встречаются редко.Однако они присутствуют в тех местах, где необходим крупный вращающий элемент и в работе возможны частые перемены нагрузки.
Кроме того, данный вид машин применяют там, где требуется хорошая напряженность, чтобы запустить процессы устройства.
Это происходит благодаря большому уровню мощности и преимуществу улучшать показатель силы электросети. Это значительно уменьшит расходы на электричество и нагрузку на линии.
В данной публикации мы расскажем о том, что это за прибор, сферы его применения, положительные и отрицательные свойства.
Дефиниция и способ функционирования синхронного привода
Проще говоря, синхронный электрический двигатель, это мотор, у которого частота движения ротора одинакова с частотой движения магнитного поля в воздушной прослойке.
Вкратце обсудим способ функционирования этого прибора — он основывается на воздействии движущегося по кругу силового поля статора, которое зачастую образовано трёхфазным переменным током, и постоянного магнитного поля ротора.
Во время использования постоянного магнита либо обмотки возбуждения, получается неизменное силовое поле ротора.В обмотках статора электроток образует вертящееся силовое поле.
В это время ротор в эксплуатационном режиме является просто постоянным магнитом. Его полюса стремятся к обратным полюсам силового поля недвижимого элемента аппарата.
В итоге, движимая деталь вращается одновременно с полем неподвижной, то есть синхронно. В этом и заключается отличительная черта данного механизма.
Нужно подчеркнуть, что у переменного электрического двигателя темп движения магнитного поля статора и темп движения ротора различаются на величину скольжения.
Что касается его механических качеств, то они подобно горе – имеют пик при максимальном скольжении.

Рассчитать темп, с которым действует силовое поле возможно с помощью такого равенства:
- где f – частота тока в обмотке статора (Гц);
- p – число пар полюсов.
Аналогично, по такому методу вычисляется скорость движения вала генератора переменного тока.
В основном на промышленных заводах используют электрические двигатели переменного тока без постоянных магнитов, просто с обмоткой возбуждения.
Вместе с этим, слабые синхронные двигатели переменного тока изготавливаются с постоянными магнитами на подвижной части.
С помощью колец и щеточного узла, в мотке возбуждения пускается электроток. На синхронном электрическом двигателе эти кольца расположены перпендикулярно одному из краев статора.
Это отличает его от коллекторного электрического двигателя, в котором для пуска электротока движущейся катушке применяют коллектор.
Истоки постоянного электротока в настоящее время – цифровые тиристорные возбудители, из серии ВТЕ-1-11. До этого, когда-то применялась система возбуждения под названием «генератор—двигатель».
Здесь на одном валу с мотором закрепляли преобразователь (то есть побудитель), который через резисторы пускал электроток в моток возбуждения.
Электромотор чуть ли не всех параллельных двигателей постоянного тока изготавливается с постоянными магнитами, без использования обмотки возбуждения.
Несмотря на то, что они имеют похожий принцип работы с синхронными двигателями переменного тока, по принципу подсоединения и управления ими они имеют характерные отличия от традиционных трехфазных механизмов.
Почти самые главные свойства электрических двигателей состоят в их механических особенностях. У синхронных двигателей они напоминают ровную горизонтальную полосу.
То есть, нагрузка на вал не оказывает влияния на количество его вращений до тех пор, пока не наступит максимально возможный предел.
Такой эффект получается за счет подаваемого импульса постоянного электротока. Именно из-за этого, синхронный двигатель хорошо переносит регулярные вращения при колеблющихся напряжениях и частых перегрузках до критического порога.
Построение вращающейся части (ротора) синхронного мотора
Как и большинство моторов, трехфазный электродвигатель имеет в своем составе опорные детали, такие как:
- Статор или якорь (здесь располагаются мотки);
- Ротор или индуктор (здесь закрепляют обмотку либо магниты, за счет которых образуется силовое поле).
Вначале на подвижном элементе закрепляют два кольца для протекания тока. Поскольку импульс у нас постоянного электротока, то на одно кольцо пускают минус, а на другое — плюс. Щеточный узел расположен на специальном держателе.
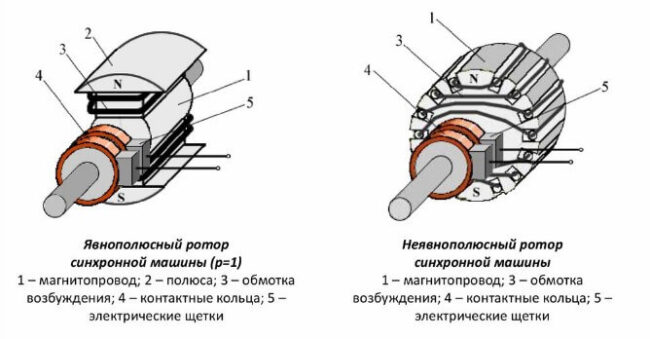
В зависимости от предназначения, роторы синхронных двигателей разделяются на два вида:
- Неявнополюсные (на вид – как овальная колодка, в разрезе на которой лежат провода обмоток). Применяется при высоких темпах вращения, свыше 1500 оборотов за минуту, и маленьком количестве полюсов.
- Явнополюсные (отчетливо видны полюса). Применяют при небольших скоростях, но большом количестве полюсов.
Запуск трехфазного электродвигателя
Специфика данного типа движка состоит в том, что от простого подсоединения к сети, действовать они не начнут. Поэтому, для запускания синхронного двигателя требуется не только импульс электротока, но и знания о довольно непростой схеме подключения.
Начало работы двигателя осуществляется аналогично синхронному. А вот для производства пускового элемента, кроме мотка возбуждения, на подвижной части устанавливают вспомогательную короткозамкнутую обмотку под названием «беличья клетка».
В силу того, что она увеличивает стойкость к резким перегрузкам, ее еще именуют демпфирующей.
По причине того, что при запуске в обмотке ротора импульс электротока не присутствует, его необходимо ускорить до необходимого темпа (на 4-6% меньше синхронной скорости). Затем пускается электроток, который побуждает ток статора к колебаниям. Так механизм входит в синхронизм и начинает работать в эксплуатационном режиме.
Чтобы регулировать пусковой электроток у мощных двигателей, можно снизить напряжение на зажимах мотков неподвижной его части. Для этого используют автотрансформаторы либо другой пассивный элемент цепи, со значением электрического сопротивления.
К обмотке возбуждения подсоединяются резисторы. Желательно, чтобы их сопротивление было больше обмотки в 2-10 раз. Подсоединение нужно выполнять во время запуска механизма в асинхронном режиме.
Это необходимо для того, чтобы силовой поток, который образуется под влиянием токов, не тормозил разбег, и, чтобы не повредить обмотки из-за действующих электродвижущих сил.
Разновидности
Мы предоставили подробное описание самого популярного вида электродвигателей переменного тока. Его чаще всего можно встретить на заводах. Но существуют еще некоторые разновидности, среди них:
- SPMSM (SurfacePermanentMagnetSynchronousMotor) – синхронный двигатель с поверхностным постоянным магнитом. Есть и другие виды, но разница между ними состоит в принципе управления и виде электротока (синусоидальная либо трапециевидная). Их можно встретить в верстаках, моделях на радиоуправлении, разном электрическом инструменте. Суть их работы основывается на особенном преобразователе и напрямую не зависит от электротока;
- Шаговые двигатели. В них ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора.В основном их применяют для обозначения рабочих деталей станков с числовым программным управлением. А также для контроля над разными частями автоматизированных систем. Такие двигатели содержат статор, на котором располагаются обмотки возбуждения, и ротор, изготовленный из магнитотвердых или магнитомягких сплавов. В целом, они схожи с предшествующими видами;
- Гистерезисные;
- Реактивные;
- Реактивно-гистерезисные.
Оставшиеся три вида двигателей функционируют благодаря специальному устройству движимой части, и, как предыдущие, не имеют щеток. К примеру, у реактивных электрических двигателей есть несколько конструкций ротора:
- Аксиально-расслоенный ротор;
- Ротор с явно выраженными полюсами;
- Поперечно-расслоенный ротор.
Не будем вдаваться в подробности их функционирования, поскольку они займут достаточно много времени.
Вероятнее всего, что такие двигатели в реальной жизни вы можете не встретить, чаще всего – это аппараты с небольшой мощностью, применяемые в автоматике.
Области использования
Следует отметить, что синхронные электродвигатели обходятся намного дороже асинхронных. Кроме того, они нуждаются в дополнительном источнике постоянного электротока побуждения. Это уменьшает область использования таких типов двигателей.
Но именно синхронные двигатели нужны для функционирования аппаратов, в которых присутствуют частые перенапряжения и необходимо поддержание постоянных вращений.
В основном их можно встретить в сферах с большими мощностями (измерение идет в сотнях киловатт, мегаватт). При этом, запуск и прерывание работы случаются довольно редко, то есть механизмы работают продолжительное время, 24/7.
Это можно объяснить тем, что электродвигатели постоянного тока работают с коэффициентом мощности, значение которого стремится к 1.
Они способны отдавать реактивную мощность в сеть, и на выходе получать более рациональное потребление электричества, что очень актуально для современных производств.
Положительные и отрицательные стороны
![]()
Как вы уже догадались, у любого механизма есть свои сильные и слабые стороны. У синхронных электродвигателей положительные характеристики заключаются в том, что:
- Они взаимодействуют с коэффициентом мощности, который стремиться к 1. А значит, экономят потребление сети.
- Во время перегрузок они отдают реактивную мощность в сеть, тем самым улучшая косинус фи.
- Критическое значение, которое образуется на валу синхронного двигателя, равноU, а уасинхронного — U² (квадратичная корреляция от напряжения). Это означает, что первый – способен хорошо переносить нагрузки, стабилен в своей работе, и не взаимодействует с напряжением в электросети.
- Как результат – темп движения устойчив при перенапряжениях и провисаниях, особенно при увеличении электротока возбуждения.

Но не все так гладко. Значительный недостаток синхронного двигателя заключается в том, что его устройство труднее, чем у асинхронного. Здесь необходим побудитель, без которого машина просто не будет работать.
Эти факторы влияют на сравнительно большую стоимость и вызывают некоторые трудности в обслуживании и эксплуатации механизма.
Собственно на этом список положительных и отрицательных черт электродвигателей постоянного тока исчерпан. В этой публикации наша команда попыталась доступно и коротко описать основные характеристики синхронных двигателей.
Если вы хотите поделиться более полной информацией, напишите ее внизу под этой статьей. Спасибо!
Устройство и принцип действия синхронных электродвигателей
Синхронный электродвигатель – электрическая установка, действующая от сети переменного и постоянного тока. Синхронная машина улучшает коэффициент мощности. Данные моторы используются довольно часто в электрической системе, потому что они подходят для любой сети напряжения и обладают высокими экономическими данными.
Область применения
- конвейеры,
- мощные вентиляторы,
- мельницы,
- эксгаустеры,
- компрессоры,
- дробилки,
- прокатные станки.
Преимущества и недостатки
Синхронный электродвигатель имеет сложнее структуру, чем асинхронный, но обладает некоторыми достоинствами.
Главным положительным качеством данных агрегатов является способность поддерживать оптимальный режим реактивной энергии. Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Данным двигателям не страшны перебои в сети, которой равен их максимальный момент. А значение критического момента равно квадрату напряжения.
Агрегат выдерживает большую перегрузку, которую можно еще увеличить автоматически повышением тока при необходимости непродолжительной нагрузки на вал. Он имеет постоянную скорость вращения независимо от нагрузки.
Трехфазный синхронный двигатель дороже обычного асинхронного из-за сложного механизма и особого устройства.
Еще недостатком оказывается надобность в постоянном источнике энергии, функции которого выполняет выпрямитель или специализированный возбудитель.
Устройство электродвигателя
Синхронный мотор имеет две основные части — статор и ротор. Неподвижная часть называется статором, а подвижный элемент ротором.
 Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Статор представлен корпусом и сердечником, состоящим из двухфазных и трехфазных обмоток. Обмотка бывает распределенная и сосредоточенная. У распределенной насчитываются пазы полюса и фазы Q= 2,3.
У сосредоточенной обмотки пазы полюса и фазы Q=1. Пазы размещены на одинаковом расстоянии на окружности неподвижной части двигателя. Катушки статора соединяются последовательно или параллельно. Такие обмотки не могут влиять на форму кривой ЭДС. Электродвижущая сила имеет трапецеидальную и синусоидальную форму. У явно выраженного полюса форма ротора и наводимая электродвижущая сила проводника является трапециевидной формы (а). При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной. Осуществление возможно благодаря наличию скосов на наконечнике полюса ротора.

Ротор синхронного двигателя переменного тока: а — явно выраженный полюс, 6 — неявно выраженный полюс.
Неявно выраженные полюса обладают равной индуктивностью продольных и поперечных осей, а явно выраженные полюса имеют одинаковую величину поперечной и продольной индуктивности (б).
Принцип действия

Принцип действия электрической машины переменного тока: 1 — статор, 2 — ротор.
У однофазного двигателя отсутствует пусковой момент. При подключении обмотки якоря к сети переменного тока, ротор неподвижен, в обмотку возбуждения поступает постоянный ток, за время одного изменения напряжения, два раза происходит смена направления электромагнитного момента. Значение среднего момента равняется нулю. Ротор разгоняется посредством внешнего момента до вращающейся частоты, которая приближается к синхронности.
Из-за высокого значения коэффициента мощности обеспечивается снижение потребления электричества, уменьшаются потери. В сравнении с асинхронным механизмом с такой же мощностью, синхронный двигатель имеет КПД выше. Так как крутящийся момент аналогичен напряжению сети. Даже снижение напряжения не влияет на нагрузочную способность. Что свидетельствует о надежности механизма.
Тип подключения делится на однофазный и трехфазный. Синхронные агрегаты чаще бывают трехфазными. При положении проводников трехфазного двигателя в определенной геометрической позиции появляется электромагнитное поле, которое вращается с одновременной скоростью. При имении магнита во вращающемся поле, они замыкают, крутятся параллельно. Двигатель можно назвать нерегулируемым, так как его скорость постоянная.
Пуск электродвигателя
Существует два способа пуска синхронной машины.
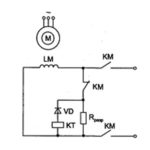
- Асинхронное включение
Схема пуска на основе глухо подключенного возбудителя, применима для статистического момента нагрузки менее 0,4, без падений напряжения.
![]()
Асинхронный пуск с помощью трансформатора
В обмотке возбуждения замыкается сопротивление разряда, избегая тем самым перебои возбуждения обмотки на впуске, потому как на небольшой скорости вращения ротора возникают перенапряжения. Если скорость приближается к синхронной, реагирует контактор, а обмотка возбуждения переключается из разрядного сопротивления на якорь возбудителя.
- Применение тиристорного возбудителя
Возбуждение, осуществляемое при помощи электромагнитного реле
Пуск с тиристорным возбудителем более надежный, обладает высоким КПД. Легче становится управление возбуждением, напряжение шин, остановка в аварийном режиме. Во многих моделях электродвигателей установлены тиристорные возбудители. Подача возбуждения работает автоматически функцией скорости и тока.
Синхронный компенсатор
Упрощенная конструкция для холостого хода называется компенсатором.
 Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Синхронный электродвигатель применяется в сети переменного и постоянного тока, обеспечивая высокую надежность работы. Этот двигатель улучшит коэффициент мощности предприятия.
СИНХРОННЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА
Синхронные двигатели – это машины переменного тока, преобразующие электрическую энергию в механическое вращение приводного вала.
Их особенность проявляется в синхронном взаимодействии вращающейся ЭДС неподвижного статора с электромагнитным полем подвижного ротора.
Для понимания принципа этого взаимодействия важно ознакомиться с существующими разновидностями синхронных агрегатов и их устройством.
УСТРОЙСТВО И ПРИНЦИП РАБОТЫ СИНХРОННОГО ДВИГАТЕЛЯ
При рассмотрении устройства двигателей синхронного типа выделяются следующие основные части:

- литой корпус агрегата;
- неподвижный статор с комплектом обмоток;
- подвижный ротор с приводным валом;
- контактно-щеточный узел.
Статор или якорь электродвигателя набран из листов электротехнической стали, позволяющей усилить создаваемые в нем магнитные потоки.
В специальных пазах размещаются рабочие обмотки, создающие вращающееся магнитное поле. Кроме того, ротор электродвигателя оснащается обмоткой возбуждения, обеспечивающей электромагнитное взаимодействие с вращающимся полем статора.
При подаче напряжения в подвижном узле формируется собственное э/м поле, приводящее к вращению ротора с приводным валом. Контактные кольца с комплектом щеток необходимы для подачи питания на его обмотки.
Роторные обмотки имеют два исполнения. Первое представлено образцами с явно выраженными полюсами, а второе имеет катушки распределенного типа (в этом варианте они укладываются в пазы ротора). Помимо этого описываемый узел может выполняться в виде короткозамкнутого витка (так называемая «беличья клетка»).
ВИДЫ И ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ СИНХРОННОГО ТИПА
По числу обмоток, используемых для создания вращающегося поля статора, все известные модели синхронных двигателей делятся на:
- однофазные;
- трехфазные устройства.
Последние предназначаются для работы в условиях повышенных напряжений и нагрузок, что характерно для условий промышленного производства. Их полезная мощность порой достигает сотен кВт.
В отличие от них однофазные электродвигатели могут подключаться к бытовым электрическим сетям переменного тока частотой 50 Гц и напряжением 220 Вольт. Как правило, эти устройства имеют мощность в пределах от 5 Вт до 10 кВт.
По рабочей эффективности они существенно уступают своим трехфазным аналогам. Однофазная схема включения заметно снижает КПД двигателя и величину его пускового момента. Вместе с тем агрегаты этого типа способны выдерживать большие перегрузки на валу.
ПРЕИМУЩЕСТВА И НЕДОСТАТКИ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
В сравнении с другими образцами машин переменного тока синхронные имеют следующие бесспорные преимущества:
- постоянство скорости вращения приводного вала при нагрузке, меняющейся в широких пределах;
- высокие показатели кпд и передачи полезной мощности в нагрузку;
- сравнительно низкий коэффициент реактивной составляющей;
- возможность длительной работы в режиме перегрузки;
- меньшая зависимость от колебаний напряжения в питающей сети.
Указанные преимущества и определяют области их применения: мощные вентиляционные системы, конвейерные линии, компрессоры и прокатные станы.
К числу существенных недостатков электродвигателей синхронного типа относят:
- сложность конструкции и сравнительно высокая стоимость;
- технические сложности с запуском электродвигателя в работу;
- потребность в дополнительном источнике постоянного напряжения;
- сложность управления основными параметрами двигателя (скоростью вращения и моментом на валу).
Все перечисленные недостатки синхронных машин переменного тока устраняются за счет использования дополнительных систем плавного запуска. Хорошего результата удается добиться, если для управления работой двигателя используются электронные устройства (частотные преобразователи).
СПОСОБЫ И УСТРОЙСТВА ПЛАВНОГО ПУСКА И УПРАВЛЕНИЯ
Добиться плавного пуска удается за счет использования дополнительного двигателя или же посредством асинхронного запуска.
Первый случай не требует пояснений, а во втором используется принцип асинхронности вращения э/м полей, приводящих к эффекту скольжения на начальном этапе работы. У каждого из этих вариантов имеются свои достоинства и недостатки.
Для эффективного управления режимами работы синхронного двигателя используется зависимость частоты вращения ротора от питающего напряжения.
При заданном значении токовой составляющей такое управление сводится к изменению мощности на валу. Реализовать его удается различными способами, но наиболее эффективными считаются электронные устройства (преобразователи).
Для управления режимами работы применяются современные полупроводниковые компоненты. К последним относятся транзисторы, тиристоры и симисторы.
С помощью этих быстродействующих элементов удается менять величину мощности в нагрузке, используя принципы широтно-импульсного или фазоимпульсного регулирования.
© 2014-2021 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.
Что такое синхронный двигатель и где он используется
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
- Определение и принцип действия
- Конструкция ротора
- Пуск синхронного двигателя
- Виды
- Сфера применения
- Преимущества и недостатки
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.

Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).

Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
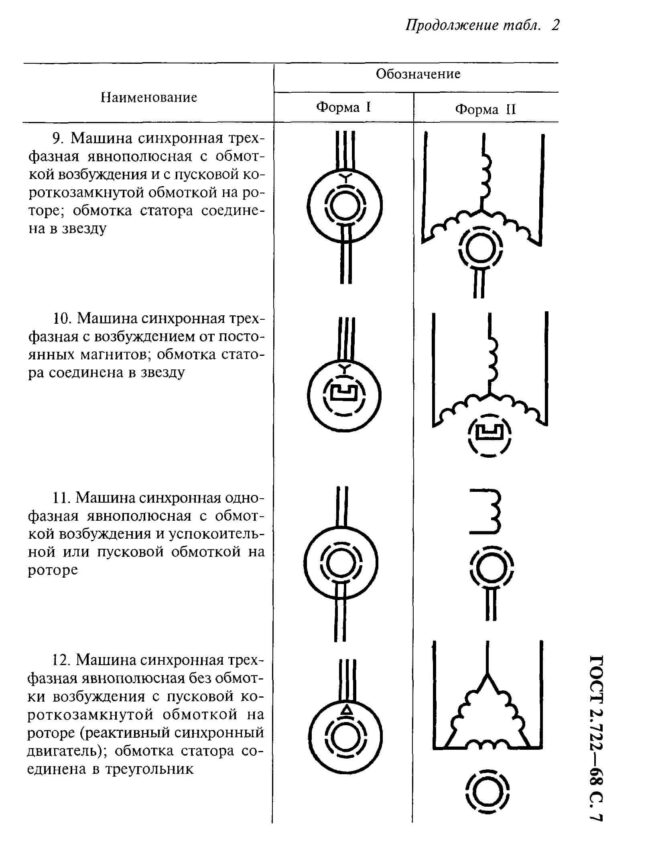
Ниже вы видите условное обозначение на схеме синхронной машины.

Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.

Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.

Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 – 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.

Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.

При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.